M5StackにM5StickCのHATを繋ぐのを試してみた、という話の続き。
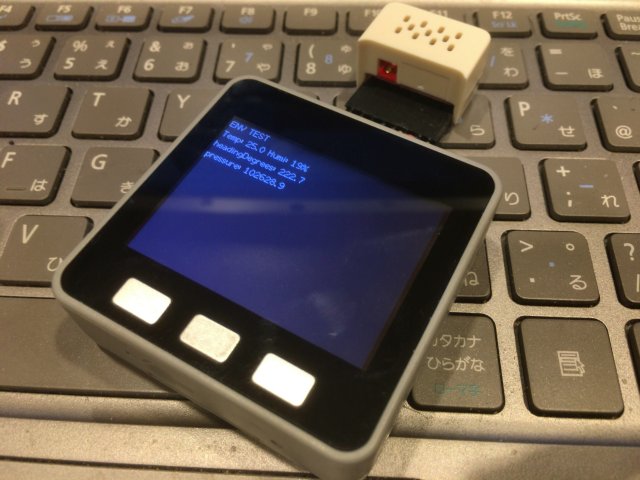
ENV-HATの温度湿度センサーと気圧センサーを実際にM5Stackで動かしてみた。
やり方としては、Arduino IDEのライブラリのM5StickC ENV-HAT用の exampleスケッチを元にして、少し書き換えて動かした。
ソースコードは次のとおり。
/*
note: need add library Adafruit_BMP280 from library manage
Github: https://github.com/adafruit/Adafruit_BMP280_Library
*/
//#include <M5StickC.h>
#include <M5Stack.h>
#include "DHT12.h"
#include <Wire.h>
#include "Adafruit_Sensor.h"
#include <Adafruit_BMP280.h>
#include "bmm150.h"
#include "bmm150_defs.h"
DHT12 dht12;
BMM150 bmm = BMM150();
bmm150_mag_data value_offset;
Adafruit_BMP280 bme;
void calibrate(uint32_t timeout)
{
int16_t value_x_min = 0;
int16_t value_x_max = 0;
int16_t value_y_min = 0;
int16_t value_y_max = 0;
int16_t value_z_min = 0;
int16_t value_z_max = 0;
uint32_t timeStart = 0;
bmm.read_mag_data();
value_x_min = bmm.raw_mag_data.raw_datax;
value_x_max = bmm.raw_mag_data.raw_datax;
value_y_min = bmm.raw_mag_data.raw_datay;
value_y_max = bmm.raw_mag_data.raw_datay;
value_z_min = bmm.raw_mag_data.raw_dataz;
value_z_max = bmm.raw_mag_data.raw_dataz;
delay(100);
timeStart = millis();
while((millis() - timeStart) < timeout)
{
bmm.read_mag_data();
/* Update x-Axis max/min value */
if(value_x_min > bmm.raw_mag_data.raw_datax)
{
value_x_min = bmm.raw_mag_data.raw_datax;
// Serial.print("Update value_x_min: ");
// Serial.println(value_x_min);
}
else if(value_x_max < bmm.raw_mag_data.raw_datax)
{
value_x_max = bmm.raw_mag_data.raw_datax;
// Serial.print("update value_x_max: ");
// Serial.println(value_x_max);
}
/* Update y-Axis max/min value */
if(value_y_min > bmm.raw_mag_data.raw_datay)
{
value_y_min = bmm.raw_mag_data.raw_datay;
// Serial.print("Update value_y_min: ");
// Serial.println(value_y_min);
}
else if(value_y_max < bmm.raw_mag_data.raw_datay)
{
value_y_max = bmm.raw_mag_data.raw_datay;
// Serial.print("update value_y_max: ");
// Serial.println(value_y_max);
}
/* Update z-Axis max/min value */
if(value_z_min > bmm.raw_mag_data.raw_dataz)
{
value_z_min = bmm.raw_mag_data.raw_dataz;
// Serial.print("Update value_z_min: ");
// Serial.println(value_z_min);
}
else if(value_z_max < bmm.raw_mag_data.raw_dataz)
{
value_z_max = bmm.raw_mag_data.raw_dataz;
// Serial.print("update value_z_max: ");
// Serial.println(value_z_max);
}
Serial.print(".");
delay(1);
}
value_offset.x = value_x_min + (value_x_max - value_x_min)/2;
value_offset.y = value_y_min + (value_y_max - value_y_min)/2;
value_offset.z = value_z_min + (value_z_max - value_z_min)/2;
}
void setup() {
// put your setup code here, to run once:
M5.begin();
Wire.begin(); //Wire.begin(0,26);
//M5.Lcd.setRotation(3);
M5.Lcd.fillScreen(BLACK);
M5.Lcd.setCursor(0, 0, 2);
M5.Lcd.println("ENV TEST");
pinMode(BUTTON_A_PIN, INPUT);
if(bmm.initialize() == BMM150_E_ID_NOT_CONFORM) {
Serial.println("Chip ID can not read!");
while(1);
} else {
Serial.println("Initialize done!");
}
if (!bme.begin(0x76)){
Serial.println("Could not find a valid BMP280 sensor, check wiring!");
while (1);
}
calibrate(10);
Serial.print("\n\rCalibrate done..");
}
uint8_t setup_flag = 1;
void loop() {
// put your main code here, to run repeatedly:
float tmp = dht12.readTemperature();
float hum = dht12.readHumidity();
M5.Lcd.setCursor(0, 20, 2);
M5.Lcd.printf("Temp: %2.1f Humi: %2.0f%%", tmp, hum);
bmm150_mag_data value;
bmm.read_mag_data();
value.x = bmm.raw_mag_data.raw_datax - value_offset.x;
value.y = bmm.raw_mag_data.raw_datay - value_offset.y;
value.z = bmm.raw_mag_data.raw_dataz - value_offset.z;
float xyHeading = atan2(value.x, value.y);
float zxHeading = atan2(value.z, value.x);
float heading = xyHeading;
if(heading < 0)
heading += 2*PI;
if(heading > 2*PI)
heading -= 2*PI;
float headingDegrees = heading * 180/M_PI;
float xyHeadingDegrees = xyHeading * 180 / M_PI;
float zxHeadingDegrees = zxHeading * 180 / M_PI;
Serial.print("Heading: ");
Serial.println(headingDegrees);
Serial.print("xyHeadingDegrees: ");
Serial.println(xyHeadingDegrees);
Serial.print("zxHeadingDegrees: ");
Serial.println(zxHeadingDegrees);
M5.Lcd.setCursor(0, 40, 2);
M5.Lcd.printf("headingDegrees: %2.1f", headingDegrees);
float pressure = bme.readPressure();
M5.Lcd.setCursor(0, 60, 2);
M5.Lcd.printf("pressure: %2.1f", pressure);
delay(100);
if(!setup_flag){
setup_flag = 1;
if(bmm.initialize() == BMM150_E_ID_NOT_CONFORM) {
Serial.println("Chip ID can not read!");
while(1);
} else {
Serial.println("Initialize done!");
}
if (!bme.begin(0x76)){
Serial.println("Could not find a valid BMP280 sensor, check wiring!");
while (1);
}
calibrate(10);
Serial.print("\n\rCalibrate done..");
}
if(digitalRead(BUTTON_A_PIN) == LOW){
setup_flag = 0;
while(digitalRead(BUTTON_A_PIN) == LOW);
}
}
磁気センサーで地磁気を計測して求めた方位も表示しているのだが、センサーの取り付けの向きがM5StickCと違うので、方位がずれてしまっている。