安価な2WDのロボットカーのキットを手に入れたので、マイコンと繋いでみる。(昨日の話の続きだ。)
キットには、モーターを制御するための回路とかが無いので、マイコンでモーターの制御をするための回路が必要だ。モーター制御回路を自作するのは面倒なので、モーター制御回路のキットとかが欲しい。
DCモーターなので、単純に電源をOn/Offしてやれば、車を直進させたり、ストップさせたりできる。電源の接続方向を逆にしてやれば車をバックさせることもできる。
単純なOn/Offだけなら大電流を流せるトランジスタを1つ繋ぐだけで良いので簡単だが、電源の接続方向の逆にしたい場合には、トランジスタ4つでH型ブリッジ回路を作るというのが定番だ。
あるいはそういった回路がICのパッケージに入っているモーター制御ICというのがあるので、そういうのを使うと回路を作るのが楽になる。
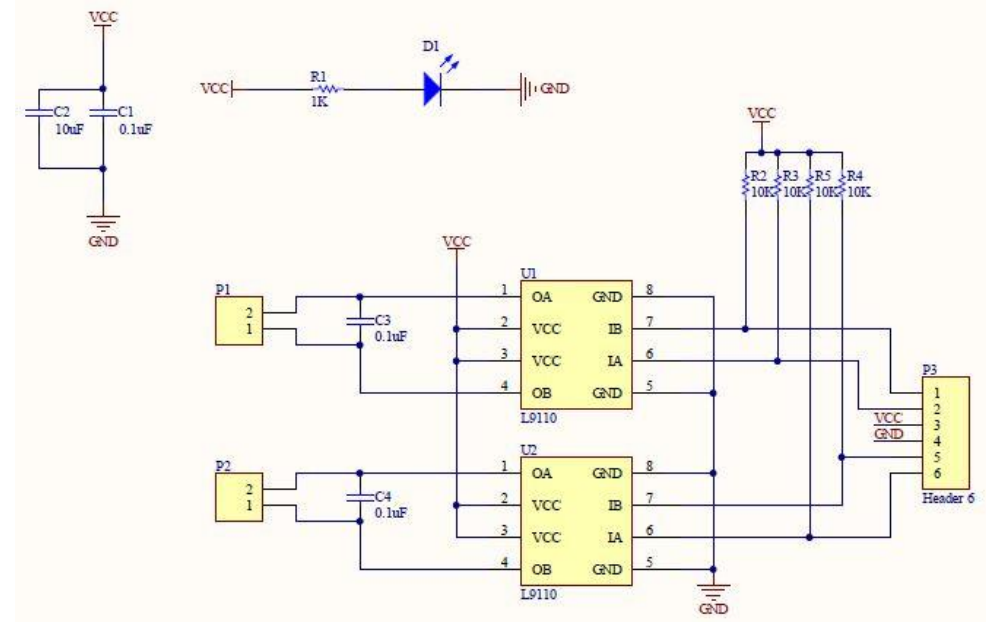
ちょうどよさそうな出来合いのモーター制御回路の基板がAmazonで安く売っていたので入手した。L9110SというICを使ったものだ。(5個セットで400円だった。単価@80円だ。)
・[TS.CORP] 5個セット L9110S Hブリッジ ステッパ モータドライブ モジュール デュアル DC ステップ モータ ドライバ コントローラボード
回路としてはこんな感じだ。
使い方は、このあたりが参考になりそうだ。
・L9110Sでモータを回す【Arduino】 – 思いつきdeものづくり
・【L9110S】120円のモータドライバ買ったった【コードもあるよ】 初心者によるArduinoとProcessingを使ったロボット製作
上記の回路図のP1,P2というコネクタの端子に、車の左右のモーターを接続すればよい。
そして、P3というコネクタの端子をマイコンのGPIOに繋ぐ。PWM波形出力できるIOピンを使うとモーターの出力の制御も可能だ。
VCCのピンは、モーターの電源を繋ぐ。今回は単3電池4本を電源に使っているので、約6Vだ。
制御用の1,2番と5,6番のピンをマイコンに繋げるのだが、5VのIO電圧でも3Vでもどちらでも使えるようだ。
マイコンボードに実際に繋げてみる。